|
Lechen Zhang I'm a first year Robotics PhD student at MBZUAI. Prior to that, I was a graduate research assistant in the Creative Machines Lab at Columbia University under Professor Hod Lipson. |
 
|
ResearchI'm interested in the intersection of computer vision, deep learning, generative AI, and robotics. My research focuses on understanding the physical world — including shape, motion, depth, and appearance — from sensor observations, with applications in robotic design and human-robot interaction. |
|
Eye, Robot: Learning Realistic Robot Gaze From Human Motion Data
Under Review Realistic Gaze Transformer (RGT), a Transformer-VAE framework that learns full-head gaze dynamics, including head rotations and eyelid movements, from human motion capture data. |
|
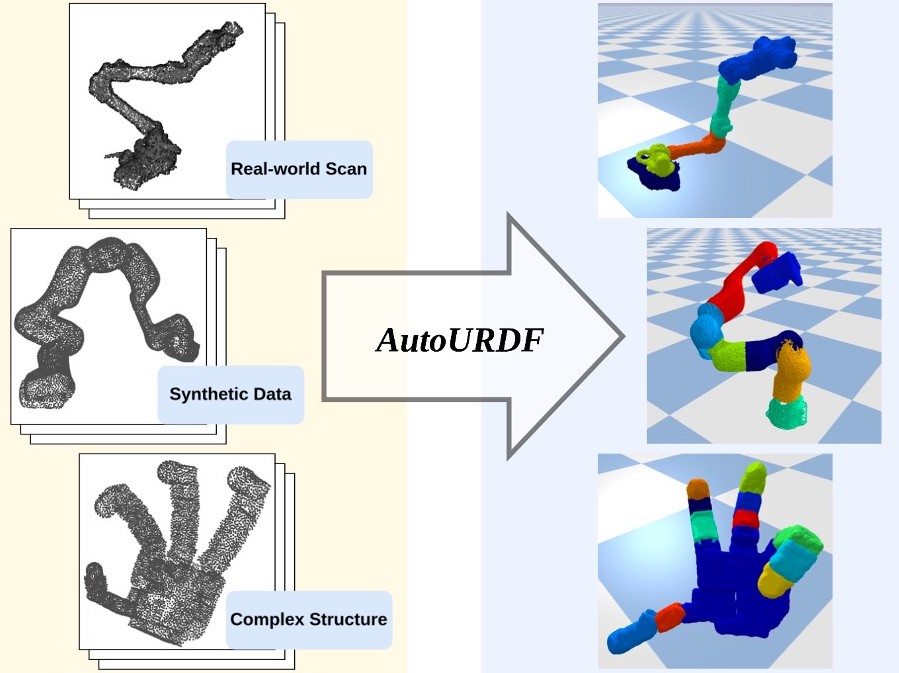
AutoURDF: Unsupervised Robot Modeling from 4D Point Cloud
Jiong Lin, Lechen Zhang, Kwansoo Lee, Jialong Ning, Judah Goldfeder, Hod Lipson CVPR 2025 (Acceptance Rate: 22.1%) project page / arXiv An unsupervised approach for understanding robot motion and constructing description files for unseen robots from point cloud frames. |
|
MoD-SLAM: Monocular Dense Mapping for Unbounded 3D Scene Reconstruction
Heng Zhou, Zhetao Guo, Yuxiang Ren, Shuhong Liu, Lechen Zhang, Kaidi Zhang, Mingrui Li, IEEE Robotics and Automation Letters (RA-L) arXiv Monocular SLAM with metric depth estimation and Gaussian-based unbounded scene representation. |
|
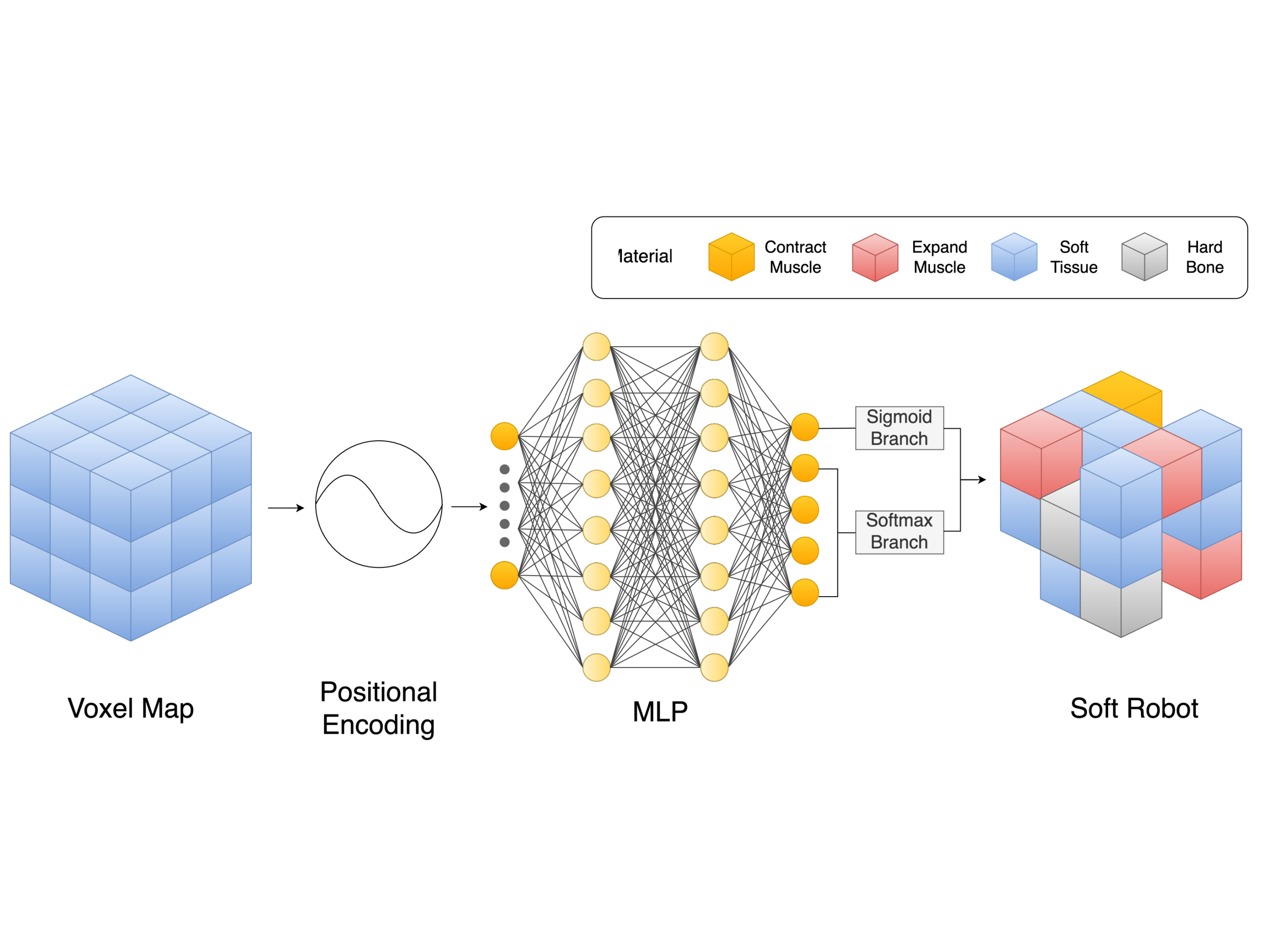
Soft Robot Neural Evolution with LLMs Supervision
Lechen Zhang ICRA 2024, Workshop on Co-design in Robotics, Oral project page / arXiv A computational framework for automatically designing soft robot morphologies using large language models for design guidance and physics simulation for evaluation. |
|
The website template is from source code by Jon Barron. |